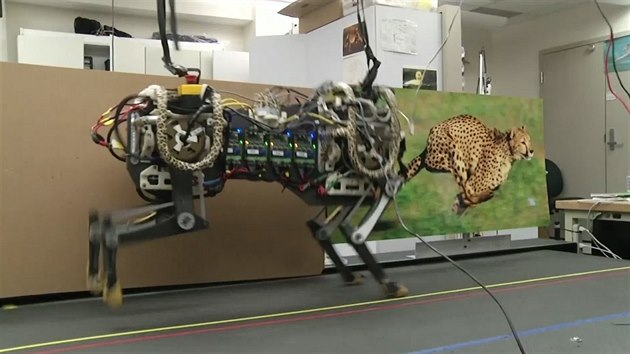
První běh absolvoval „gepard“ v ochranném boxu na běžícím pásu v roce 2012. Teprve v září 2014 vědci poprvé svého geparda pustili „do divočiny“ - tedy na trávník univerzitního campusu. Na videu (výše) z prosince 2014 vidíme gepardího robota z MIT pouze běhat a skákat maximálně 4 cm do výšky. Koncem května 2015 výzkumníci oznámili, že robot nyní umí skákat přes překážky až 40 cm vysoké.

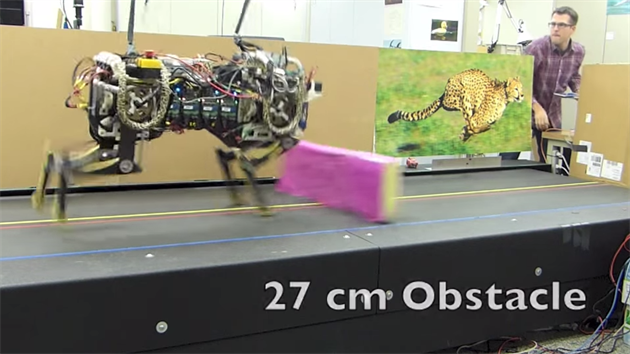
Skok na běžícím pásu přes 27cm překážku

Nad překážkou

Dopad na přední nohy

Po dopadu robot poskočí, aby srovnal tempo
Samostatné překonávání překážek (MIT Cheetah 2):
„Optimální skok je příliš nebezpečný a náročný na výpočet. Místo toho robot skáče ‚dost dobře‘.“ |
Za použití laserového radaru (LIDAR) umí robot rozpoznávat překážky. Když překážku zaregistruje, přizpůsobí běh tak, aby „mu vyšly“ kroky pro ideální skok přes překážku. Vlastně ne ideální, ale „uskutečnitelný“. Jak vysvětluje Sangbae Kim, který na MIT vyučuje mechaniku: „Optimální přeskočení překážky by znamenalo vynaložení minima energie a těsné přeskočení,“ říká hlavní autor robota. „To je nebezpečné a navíc těžké na výpočet.


Místo toho robot skáče tak, aby to bylo uskutečnitelné (v originále: feasible). „To může znamenat, že robot vyskočí výše, než je potřeba. Ale to je lepší, než kdyby o překážku zakopl a upadl. „Obvykle jsme posedlí optimálními řešeními, ale toto je případ, kdy je lepší mít jen dostatečně dobré řešení, protože výpočty za běhu musíte provádět velmi rychle,“ dodává Kim.
V laboratoři robot dokáže překonat asi 70 % překážek, na jejichž detekci má přibližně metr. V tělocvičně už má podmínky lepší, protože vidí překážky předem, a úspěšnost se zvyšuje na 90 %. To vše při běhu rychlostí 8 km/h.

Klip ukazuje skok přes překážku robota MIT Cheetah 2
Na vývoji robota spolupracuje MIT s armádní agenturou DARPA. Počítá se tedy s tím, že by roboty mohla využívat i armáda, podobně jako nyní pokusně využívá tažná „robozvířata“ od Boston Dynamics.
Aktualizace: do článku jsme doplnili údaje o vývoji robota na MIT.


